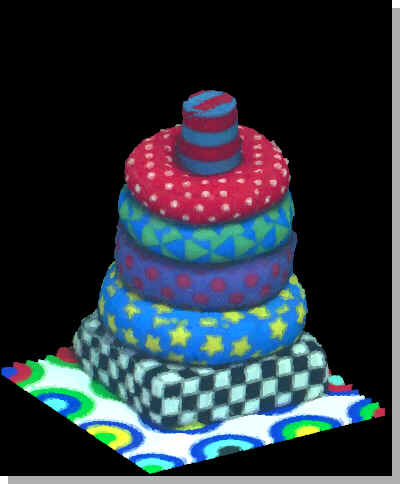
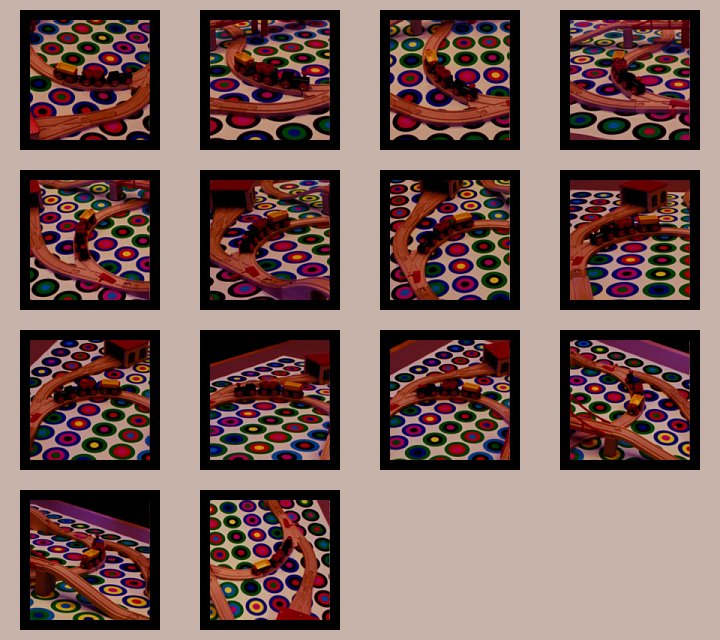
We start with a handful of images of a Lambertian scene, together with camera pose information for each. We use voxel-coloring (the algorithm shown below) to construct a volumetric model of the scene. Finally, we project the model to synthesize new images.
*Seitz and Dyer, "Photorealistic Scene Reconstruction by Voxel Coloring," 1997 IEEE Computer Society Conference on Computer Vision and Pattern Recognition
/* Voxel-Coloring pseudocode */
for all images /* clear occlusion bitmaps */
set all pixels to not-occluded
for each layer of voxels along major axis {
for each voxel V in layer {
for each image i {
find the set P(i) of pixels in the projection of V
for all pixels of P(i) which are not-occluded
add contribution to colorMean and colorStandardDeviation
}
if (colorStandardDeviation < threshold) { /* if colors match… */
mark V opaque and color V with the colorMean
for each image i
set pixels in P(i) to occluded
} else mark V transparent /* if colors do not match… */
}
}
|
Original photos |
Synthesized frames |
AVI | MPEG | |
|---|---|---|---|---|
| Tower | 28 | 100 | 522 KB | 199 KB |
| Train | 14 | 200 | 951 KB | 432 KB |

Back to top.
{kind=link}